RL学习笔记
笔者参看的是周志华老师的《机器学习》,也就是网上很热门的“西瓜书”。笔者必然比不过网上大量的经验,就不做拾人牙慧的事情了,这里主要是记录一些个人的思考,以及完善本书中的一些数学推导(本书中的数学推导确实有些简略了呢,笔者并非数学专业学生,看到公式就头疼)
第一章 绪论
这一部分介绍了一些概念,包括基础术语、假设空间、归纳偏好,然后讲了讲机器学习的发展与历史,比较笼统的串联了一下后面的章节
NFL 定理:对于所有可能的问题和数据分布,任何学习算法的性能都不会在所有问题上普遍优于其他算法。
个人觉得本书这里的后续解释有些混乱,简单来说,NFL 定理证明了:不同的学习算法在不同的问题和数据集上表现不同,无法存在一个“万能的”学习算法,能够在所有任务中表现最佳。
假设样本空间 \(\mathcal{X}\) 和假设空间 \(\mathcal{H}\) 都是离散的,令 \(P\!\left(h \mid X, \Sigma_a\right)\) 代表算法 \(\Sigma_a\) 基于训练数据 \(X\) 产生假设 \(h\) 的概率,再令 \(f\) 代表我们希望学习的真实目标函数。\(\Sigma_a\) 的“训练集外误差”,即 \(\Sigma_a\) 在训练集之外的所有样本上的误差为
这里做一下解释,这里本质上是一个算期望的过程。
\(E_{ote}(\Sigma_a \mid X, f)\) 表示当测试样本从样本空间中按分布随机抽取、算法输出的假设具有随机性时,算法在测试阶段会犯多大错误的比例
\(\displaystyle\sum_{x \in \mathcal{X}-X}P(x)\) 表示测试样本 \(x\) 是从样本空间 \(\mathcal{X}\) 中按分布 \(P(x)\) 抽取的。也就是说,我们不是只关心某一个特定输入,而是对**所有可能的输入点**按其出现概率加权。
\(\displaystyle \sum_{h\in\mathcal{H}}P(h \mid X, \Sigma_a)\) 表示学习算法 \(\Sigma_a\) 在给定的训练集 \(X\) 的情况下,可能输出不同的假设,并且每个假设 \(h\) 都有一个对应的概率
\(\mathbb{I}\!\bigl(h(x) \neq f(x)\bigr)\) 是损失函数,如果假设 \(h\) 在输入 \(x\) 上预测错误,那么记为 1,预测正确则记为 0
接下来将三个部分乘一起,表示:测试点是 x,算法产生假设是 \(h\),并且在这个点上预测错误的联合贡献
然后对所有可能的 \(f\) 进行求和,可以得到终式与学习算法无关,进而出现了 NFL 定理(这里原书的推导过程不加赘述)
之后就是经典的“机器学习的发展与历史”,不予赘述
第二章 模型评估与选择
模型总有优劣,倘若泛化性能过低,则称之为过拟合。本质原因是学习能力过于强大,把训练样本所包含的不太一般的特性给学会了
通过实验测试来对学习器的泛化误差进行评估,需要一定的测试集。而为了从数据集中分出测试集和训练集。提出了 留出法,交叉验证法 和 自助法 这样的分离方法。
- 留出法就是把测试集按比例划分
- 交叉验证法就是将数据集化成 k 个大小相似的互斥子集,每次用 k-1 个子集作为训练集,另一个作为测试集。称为 k 折交叉验证
- 自助法就是放回随机抽样,重复样本数量次抽样进行学习
学得模型在实际使用中遇到的数据称为 测试数据,模型评估与选择中用于评估测试的数据集称为 验证即
在研究对比不同算法的泛化性能时,我们用测试集上的判别效果来估计模型在实际使用时的泛化能力,而把训练数据另外划分为训练集和验证集
再接下来,我们有了可行的实验估计方法,还需要有衡量模型泛化能力的评价标准,这就是 性能度量
其中,回归任务 (输出具体数值是多少) 最常用的性能度量是“均方误差”
而分类任务比较常用的性能度量是 错误率 和 精度
但是错误率和精度不能满足所有任务需求,于是提出了 查准率(准确率) 和 查全率(召回率)。
查准率意味着有多少数据被判别为错误,查全率意味着所有准确数据有多少被挑选了出来。
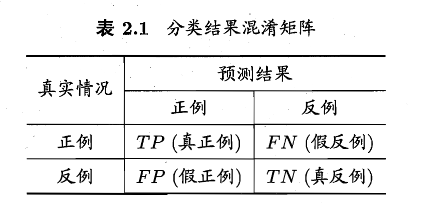
对于二分类问题,可以将样例根据其 真实类别 与 学习器预测类别 的组合划分为真正例 (TP)、假正例 (FP)、真反例 (TN)、假反例 (FN),如下表,称为分类结果的“混淆矩阵”
我们如果根据学习器的预测结果对样例进行排序,排在前面的是 学习器认为最可能是正例的样本,按此顺序逐个把样本作为正例进行预测,则每次可以计算出当前的查全率、准确率。进而做出“P-R 曲线”,类似下图
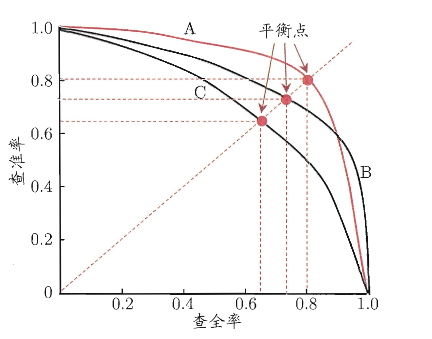
如果一个曲线 A 包住了一个曲线 C,那么充分说明学习器 A 优于学习器 C。
但也可以用 BEP(平衡点) 作为一个量度,例如 A 点 BEP=0.8>B 点 BEP,所以可以认为学习器 A 优于学习器 B
BEP 之所以能作为评判学习器优劣的量度,是因为它在不依赖主观阈值的前提下,公平、对称地衡量了模型在查准率与查全率之间的整体平衡能力,特别适用于样本不平衡且错误代价对称的任务。
不过 BEP 还是有些简略了,更常用的是 F1 度量,如下:
这里是对准确率和召回率的调和平均数,强烈惩罚了偏科的模型
再然后,我们实际的应用会对查准率 P 和查全率 R 的重视程度有所不同,所以又引入了新的变量,构成了 F1 度量的一般形式 \(F_\beta\)
其实就是把乘法力度设置为了人为的定义
以上是评判模型的泛化能力,也就是评判 模型作为一个分类器是否好用;但我们缺乏一定的量化标准去评判 学习器在不同判别阈值下区分政府样本的整体能力,所以再接下来又提出了 ROC 和 AUC 以作为度量标准
ROC 全称为受试者工作特征,根据学习器的预测结果对样例进行排序,按此顺序逐个把样本作为正例进行预测,每次计算出两个重要量的值,分别是“真正例率 TPR”和“假正例率 FPR”
可做出类似下面的图
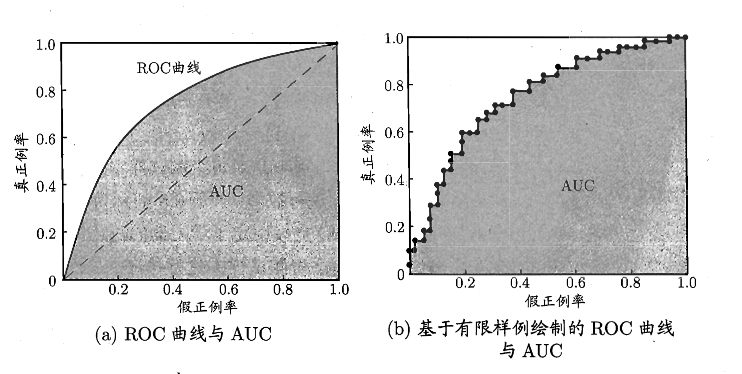
然后 AUC(Area Under ROC Curve) 就是 ROC 所包围的面积,用来评判 ROC 的好坏,进而评判学习器的性能
不过现实不是非黑即白的,通常有些预测错误会带来难以想象的代价,所以我们的模型评判要进一步一般化,为错误赋予“非均等代价”
我们可以根据任务的领域知识设定一个“代价矩阵”,如下表,\(cost_{ij}\) 表示将第 \(i\) 类样本预测为第 \(j\) 类样本的代价
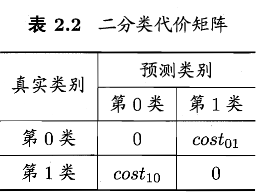
一般来说 \(cost_{ij}=0\),若将第 0 类别为第 1 类所造成的损失更大,则 \(cost_{01}>cost_{10}\);随时程度相差越大,\(cost_{01}\) 与 \(cost_{10}\) 值的差别越大
于是我们对性能度量扩展其定义,如下
“代价敏感”错误率为
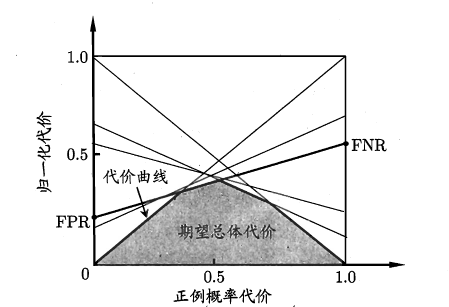
然后再次状态下,ROC 曲线是不可以直接反映出学习器的期望总体代价的,所以又加入了“代价曲线”作为评判。
代价曲线图的横轴是取值为 \([0,1]\) 的正例概率代价如下,其中 \(p\) 是样例为正例的概率:
纵轴是取值为 \([0,1]\) 的归一化代价,如下,其中 FPR 是假正例率,FNR=1-TPR 是假反例率。
接下来我们绘制代价曲线:ROC 曲线上每一点对应代价平面上一条线段,设 ROC 曲线上点的坐标为 \((TPR,FPR)\),则可以相应地计算出 \(FNR\),然后在代价平面上做一条从 \((0,FPR)\) 到 \((1,FNR)\) 的线段,线段下的面积即表示了该条件下的期望的总体代价,如下图
至此,我们有了完整的实验评估方法和性能度量,但是如今缺少了“比较”的方法。于是提出了 统计假设检验 来对学习器性能比较提供依据。本书以错误率为性能度量,用 \(\epsilon\) 表示
也就是,若在测试集上观察到学习器 A 比 B 好,则 A 的泛化性能是否在统计意义上优于 B,以及这个结论的把握有多大
现实任务中我们并不知道学习器的泛化错误率,只能获知其测试错误率 \(\hat\epsilon\) .泛化错误率与测试错误率未必相同,但直观上,二者接近的可能性应比较大,相差很远的可能性比较小。因此可以根据测试错误率估推处泛化错误率的分布
我们假设 \(m\) 个测试样本,其中泛化错误率为 \(\epsilon\) 的学习器将其中 \(m'\) 个样本误分类、其余样本全都分类正确的概率为 \(\epsilon^{m'}(1-\epsilon)^{m-m'}\),可以估算处其恰将 \(\hat\epsilon\times m\) 个样本误分类的概率如下
给定测试错误率,则解 \(\frac{\partial P(\hat{\epsilon};\epsilon)}{\partial \epsilon} = 0\Rightarrow P(\hat\epsilon ;\epsilon)_{max}\big|_{\epsilon=\hat\epsilon}\)
后面就是一些检验的介绍了
再然后,学习算法除了实验估计其泛化性能,人们往往还希望了解它“为什么”有这样的性能。于是 偏差 - 方差分解 是解释学习算法泛化性能的重要工具
偏差 - 方差分解试图对学习算法的期望泛化错误率进行拆解。算法在不同训练集上学得的结果很可能不同,即便这些训练集是来自同一个分布
我们约定:对一个测试样本 \(\vec x\),令 \(y_D\) 为 \(\vec x\) 在数据集中的标记,\(y\) 为 \(\vec x\) 的真实标记,\(f(\vec x;D)\) 为训练集 D 上学得模型 \(f\) 在 \(\vec{x}\) 上的预测输出,则
学习算法的期望预测为 \(\bar{f}(x) = \mathbb{E}_{D}\!\left[f(x;D)\right]\)
使用样本数相同的不同训练集产生的方差为 \(\mathrm{var}(x)=\mathbb{E}_{D}\!\left[\left(f(x;D)-\bar{f}(x)\right)^2\right]\)
噪声为 \(\epsilon^2=\mathbb{E}_{D}\!\left[(y_D - y)^2\right]\)
期望输出与真实标记的差别称为偏差 (bias),即 \(\mathrm{bias}^2(x)=\left(\bar{f}(x)-y\right)^2\)
然后就是一系列数学推导,这里书上的推导相当完善,可以直接看书,最终结论为
即,泛化误差可以分解为偏差、方差和噪声之和
偏差度量了学习算法的期望预测与真是结果的偏离程度,刻画了 学习算法本身的拟合关系
方差度量了同样大小的训练集的变动导致的学习性能的变化,刻画了 数据扰动所造成的影响
噪声则表达了当前任务上学习算法所能达到的期望泛化误差的下届,刻画了 学习问题本身的难度